
- Упаковка - Логистика - Погрузочно-разгрузочные работы
- Погрузно-разгрузочные работы
- Пневматический захват
- Hangzhou FOUK Mechanical Technology Co., Ltd.
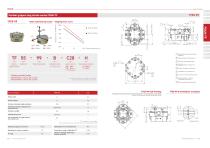
Пневматический захват TF55-99параллельный4 губкидля промышленных роботов

Добавить в папку «Избранное»
Добавить к сравнению
Характеристики
- Привод
- пневматический
- Тип
- параллельный
- Количество губок
- 4 губки
- Применение
- для промышленных роботов
- Опции
- 4 пальца
- Сила сцепления
186 N, 200 N
- Ход
8 mm
(0,315 in)
Описание
Параметры конфигурации:
B: Вентиляция в нижней части
C28: Длина толкающей штанги
H: Устойчивость к высоким температурам
Пневматический четырехпальцевый центрирующий захват с Т-образной несущей конструкцией поддерживает различные толкающие пластины. Срок службы гасящей пружины составляет более 500 000 раз. Сила захвата четырехпальцевого захвата равномерна, что позволяет стабильно захватывать предметы и предотвращать их повреждение.
---
Каталоги
TF55-99
1 Страницы
Другие изделия Hangzhou FOUK Mechanical Technology Co., Ltd.
Pneumatic Grippers
































Расширенный поиск
- Пневматический захват
- Параллельный захват
- Захват 2 губки
- Захват для промышленных роботов
- Захват 3 губки
- Угловой захват
- Концентричный захват
- Легкий захват
- Захват большой ход
- Захват 4 губки
- Захват 2 пальца
- Захват 3 пальца
- Гидравлический захват
- Захват 4 пальца
- Модуль захвата
- Герметичный захват
- Гибкий захват
- Промышленный захват
- Пневматический модуль захвата
- Модуль захвата для коллаборативного робота
* Цены указаны без учета налогов, без стоимости доставки, без учета таможенных пошлин и не включают в себя дополнительные расходы, связанные с установкой или вводом в эксплуатацию. Цены являются ориентировочными и могут меняться в зависимости от страны, цен на сырьевые товары и валютных курсов.